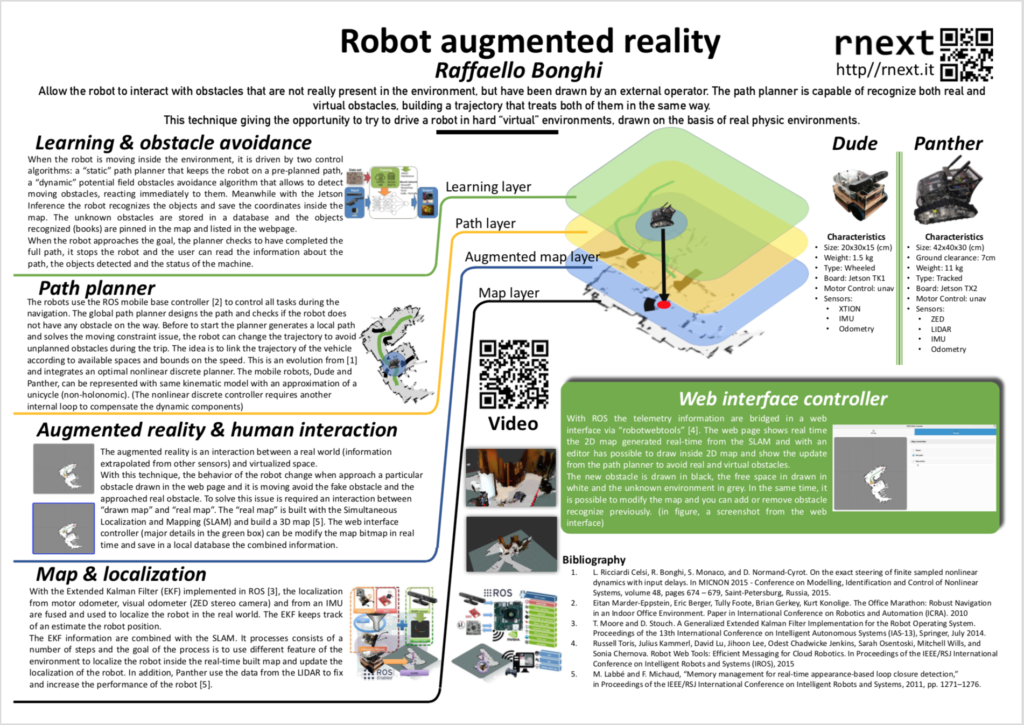
Robot augmented reality
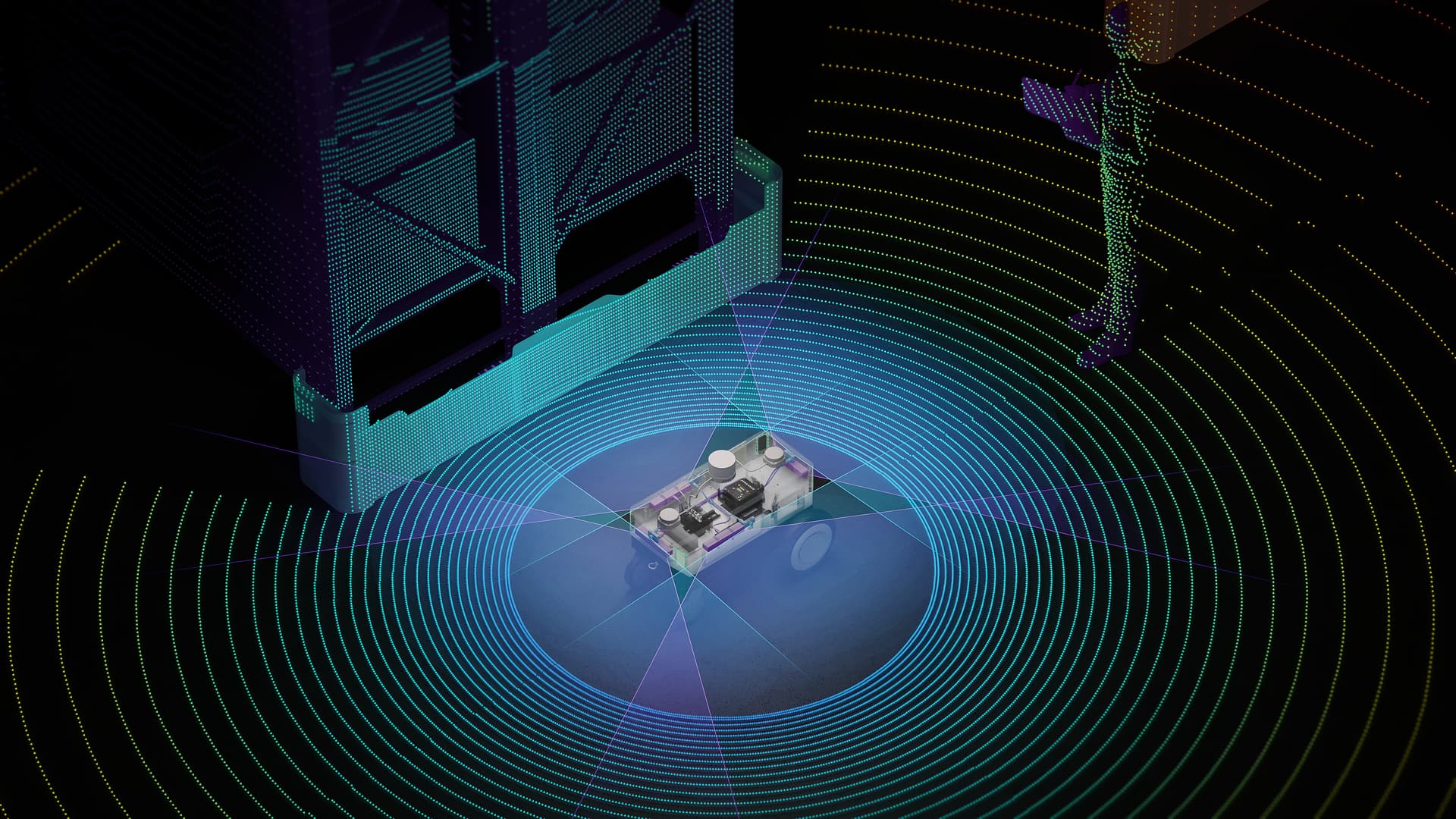
The idea is to allow the robot to interact with obstacles that are not really present in the environment, but have been drawn from an external operator. The robot uses different control techniques to navigate in an environment where there are both real obstacles and therefore with the need to avoid the obstacles and with the use of planners treated in the previous part of building a trajectory is capable of avoiding obstacles really exist in the environment and “drawn” and therefore virtual.
This technique is useful in the testing phase and staff training, thus giving the opportunity to try to drive a robot which will operate in hard environments, but just have turn on the robot and can test the behavior and see how the robot performs in a simulated environment.
Download: nvidia-gtceu-2017-robot-augmented-reality.pdf