Insta360 stick wrist support Permalink
This simple model simplify your life when you want to use your Insta360 stick and hold with and keep secure on your wrist.

This simple model simplify your life when you want to use your Insta360 stick and hold with and keep secure on your wrist.
This practical hook provides a solution for those who need to store small bags in their kitchen cabinets without having to drill any screws.
![]() Orchestrator manager to launch scripts via service
Orchestrator manager to launch scripts via service
![]() An plugin of ROS web console to interact the robot in an augmented reality environment. With this robot you can draw in real-time a new wall or clea...
An plugin of ROS web console to interact the robot in an augmented reality environment. With this robot you can draw in real-time a new wall or clea...
This brush clean your Anycubic i3 Mega nozzle before start to print
NVIDIA Jetson AGX Xavier, adapters, covers and antenna docks
📊 Simple package for monitoring and control your NVIDIA Jetson [Orin, Xavier, Nano, TX] series
![]() Docker syncronization container for Dropbox using a token app
Docker syncronization container for Dropbox using a token app
Combined stand for ZED camera and RPlidar
Set of adapters for NVIDIA Jetson AGX Xavier
![]() Automatically script to setup and configure your NVIDIA Jetson [Nano, Xavier, TX2i, TX2, TX1, TK1] . This script run different modules to upda...
Automatically script to setup and configure your NVIDIA Jetson [Nano, Xavier, TX2i, TX2, TX1, TK1] . This script run different modules to upda...
A little stand to block your ZED camera in your robot, drone. To build this stand is required a 3D printer, a photographic screw, and if you want a spray.
An plugin of ROS web console to interact the robot in an augmented reality environment. With this robot you can draw in real-time a new wall or clean an area...
![]() A ROS WEB console to control remotely your robot. Based with robotwebtools.
A ROS WEB console to control remotely your robot. Based with robotwebtools.
![]() Driver for Roboteq devices using ros_control
Driver for Roboteq devices using ros_control
Basic makerbeam components to use with SolidWorks
It’s a little powerful motor control board in 4x4cm and is open source and open hardware project is fully available on github. With this board you can contro...
With this package you can control different servos with Maestro pololu board. From this node you can update the servos status with angle position. Setup the ...
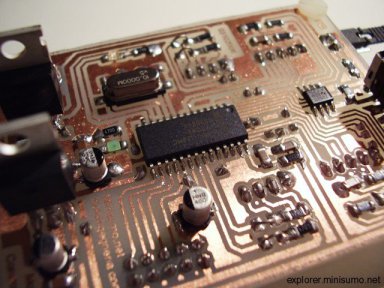
(![]() in Italian) With a Microchip dsPIC33 this board can receive different analog values simultaneously. With different filter and other information from th...
in Italian) With a Microchip dsPIC33 this board can receive different analog values simultaneously. With different filter and other information from th...
(![]() in Italian) This board was designed in 2008 which a dsPIC Microchip controller can control 2 DC brushed motor with a velocity control. In addiction thi...
in Italian) This board was designed in 2008 which a dsPIC Microchip controller can control 2 DC brushed motor with a velocity control. In addiction thi...
(![]() in Italian) It’s a powerful H-Bridge with an L298. With this simple board the robot Ottobot and Explorer can control their DC motors. It was built in 2...
in Italian) It’s a powerful H-Bridge with an L298. With this simple board the robot Ottobot and Explorer can control their DC motors. It was built in 2...
(![]() in Italian) Its an expansion shield for Xbee module. This board have inside a power regulator from 5V to 3.3V and three different leds to recognize the...
in Italian) Its an expansion shield for Xbee module. This board have inside a power regulator from 5V to 3.3V and three different leds to recognize the...
(![]() in Italian) The regulation board is used to convert the tension from lithium batteries for all high level electronics boards. This board use a LM2576 p...
in Italian) The regulation board is used to convert the tension from lithium batteries for all high level electronics boards. This board use a LM2576 p...