Hello! Welcome here!
I’m Raffaello Bonghi an 🇮🇹 Italian enthusiastic 🤖 robotics engineer, born in the eternal city of 🛵 Rome and now I’m living in 🇬🇧 England.
I studied systems automation and robotics at 👨🎓 University of Rome La Sapienza and 👨🎓 Universite Paris-Sud, but I always made robots and open-source projects!

🦕 nanosaur
The smallest NVIDIA Jetson dinosaur robot, fully 3D printable, open-source, ROS2 & Isaac ROS based.
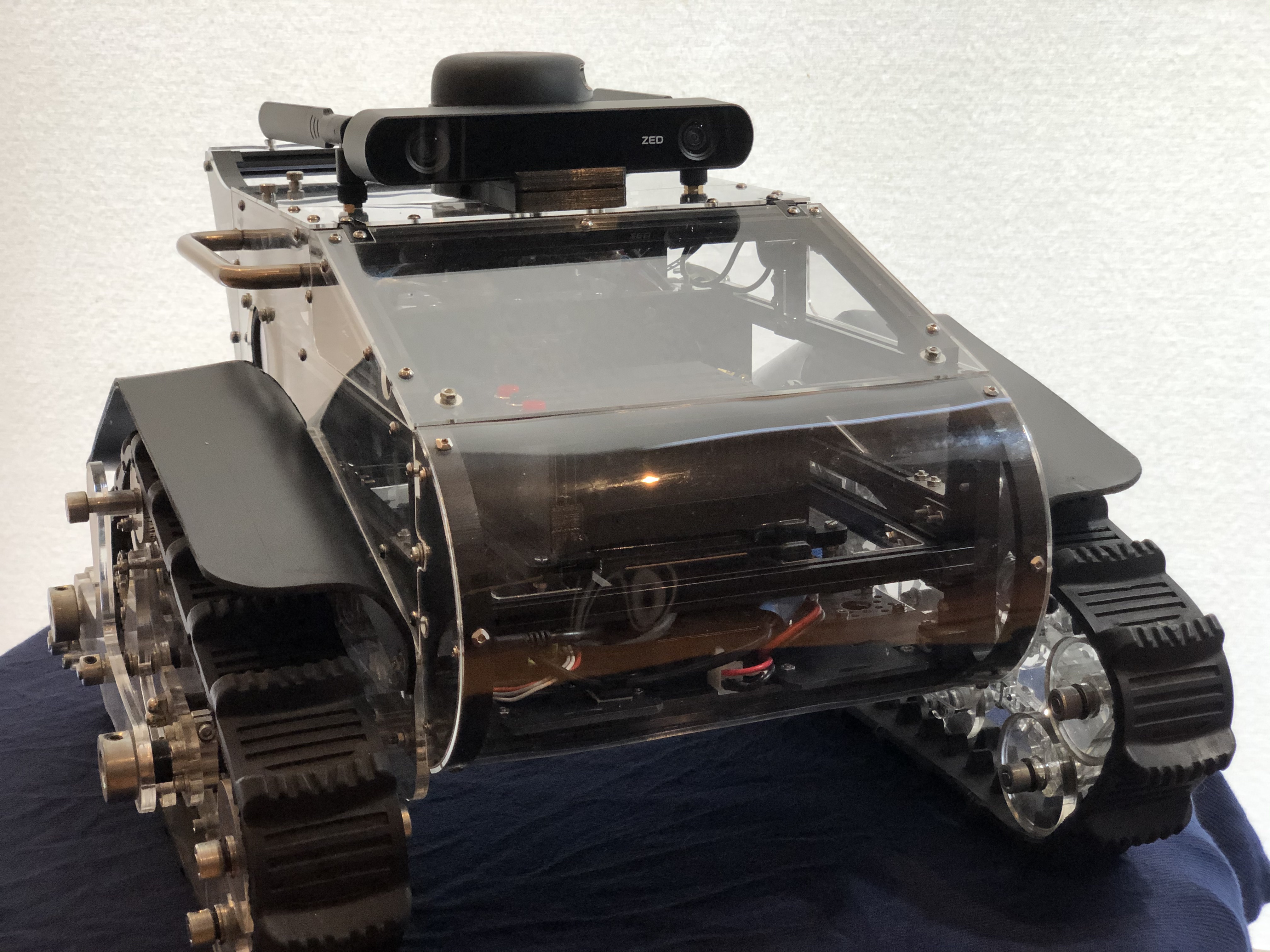
🐆 Panther
Panther an autonomous tracked robot, with a ZED2 stereocamera and an NVIDIA Jetson AGX Xavier.

📊 jetson-stats
Simple package for monitoring and control your NVIDIA Jetson [Orin, Xavier, Nano, TX] series
I am proudly part of ![]() pizzarobotics community
pizzarobotics community

Benchmarking Camera Performance on Your Workstation with NVIDIA Isaac Sim Permalink
we explore the steps to setting up and running a camera benchmark on your workstation on NVIDIA Isaac Sim.
Simulate and Localize a Husky Robot with NVIDIA Isaac Permalink
How to use Husky robot on NVIDIA Isaac SIM and Isaac ROS