
Slider fu un esperimento di minisumo che iniziò nel 2007, l’idea era di costruire un robot che una volta scaduti i 5 secondi, potesse abbattersi e diventare più grande dei 10x10cm di dimensioni massime per i minisumo. Il robot costituito da una lunga benna, più grande dei 10cm e con due servocomandi che attuavano le due ruote del robot (nella figura successiva).
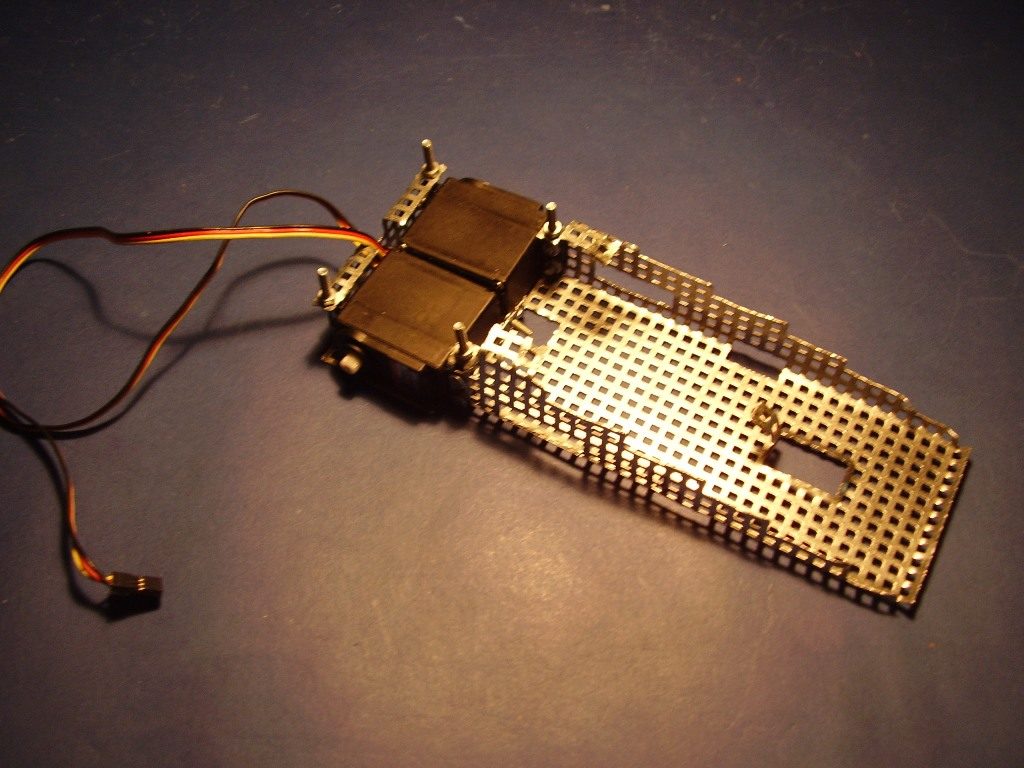
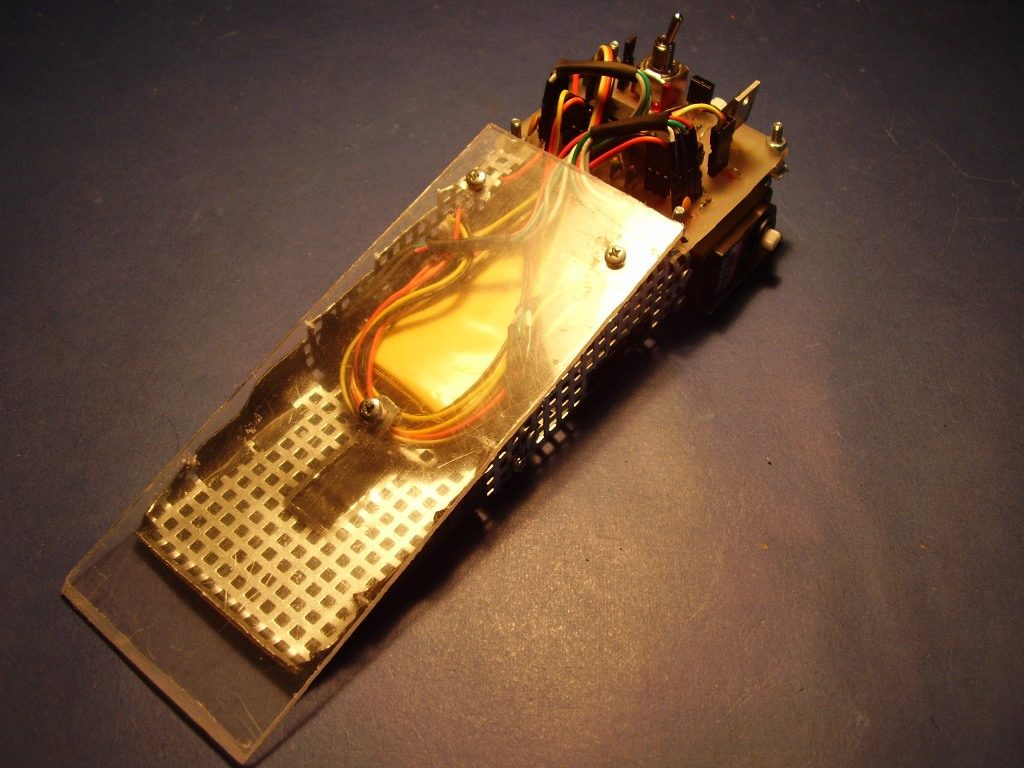
All’interno della benna erano montati tutti i sensori per riconoscere l’avversario e per riconoscere la linea, per mantenere il baricentro basso era presente anche una batteria al litio che oltre ad alimentare il robot, appesantiva la parte frontale. La benna era costituita da un un asse di poliver avvitato sul telaio principale.
I sensori che costituivano il robot erano 2 GP2D15 posti sui laterali al telaio del robot, il robot poteva soltanto ruotare una volta riconosciuto l’avversario, se l’avversario era frontalmente il robot proseguiva fino a spingerlo al bordo del ring, infine era presente un sensore posteriore per poter eseguire manovre di evasione robot che attaccavano posteriormente. Per la linea il robot usava i QRB1134.
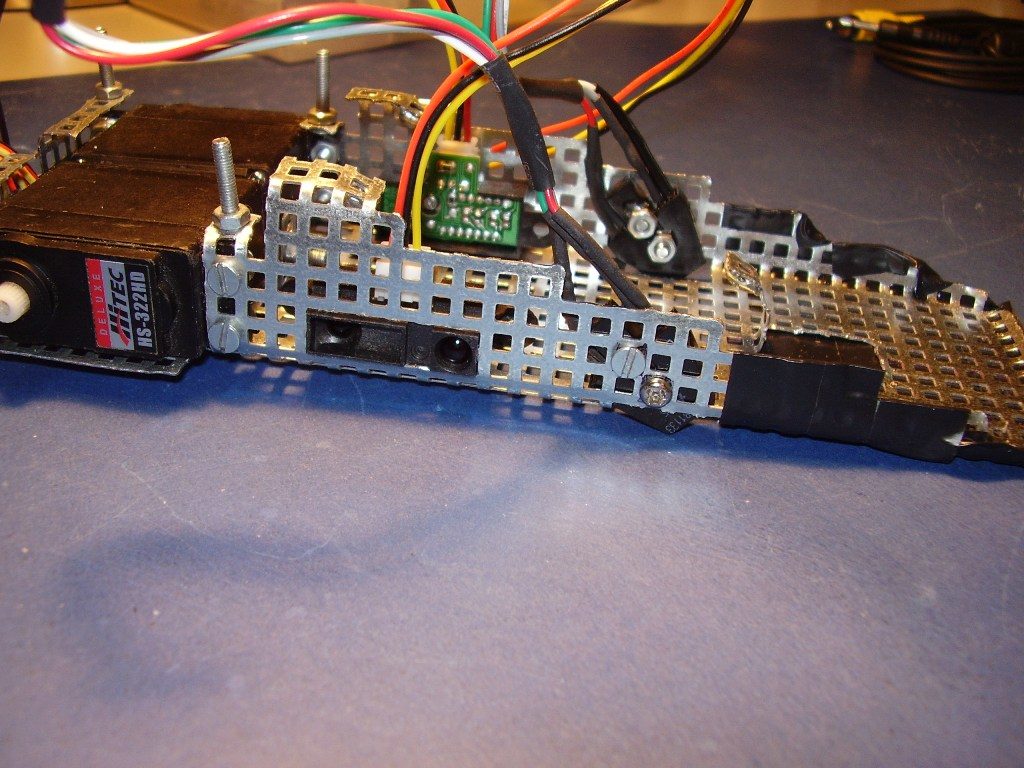
La scheda di controllo del robot fu recuperata da una precedente versione dell’elettronica del robot Dark Blade e permetteva di pilotare il robot e poter gareggiare alle gare di minisumo. Come tutti i robot costruiti anche Slider aveva come gomme quelle in Poliuretano, in modo tale da assicurare una aderenza maggiore al ring.
Il robot Slider ha potuto partecipare a poche competizioni di minisumo, anche se l’idea del progetto era innovativa nel contesto delle gare italiane, in america robot ad abbattimento sono molto più noti, non riuscì ad ottenere le vittorie sperate.

