

Dark Blade nacque nel 2005, Milano, come evoluzione del robot NX-01, l’idea del robot era di riuscire ad essere sufficientemente piccolo da non essere visto ed avere una forma di una “lama” tale da poter infilarsi sotto la benna dei robot avversari. Si iniziò quindi a progettare il telaio, in figura, partendo da un pezzo di lamiera di alluminio recuperato da una grondaia. L’obiettivo principale era quello di non farlo più alto di 3cm dal suolo, quindi tutta l’elettronica doveva essere a basso profilo ed essere costruita per lo specifico compito senza nessun componente superfluo.

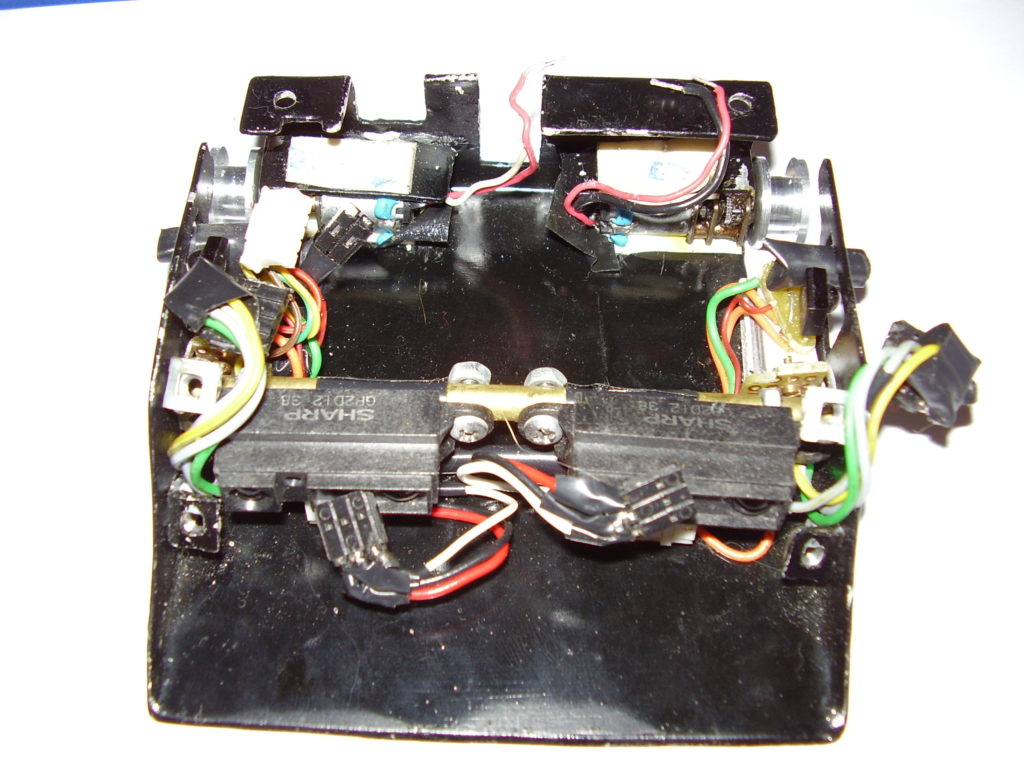
Usando dei motori sufficientemente piccoli ma con una coppia necessaria tali da poter muovere il robot e poter quindi spingere fuori dal ring l’avversario, venne quindi creato uno spazio per poter mettere i motori e tale per cui le ruote fossero incassate all’interno della struttura. Il telaio doveva anche garantire uno spazio al connettore di ricarica delle batterie, come uno spazio per tutti i sensori laterali (nella figura successiva). Affinché la struttura fosse comunque solida venne aggiunto un tubo in ottone tale da garantire la stessa distanza delle pareti laterali del robot.
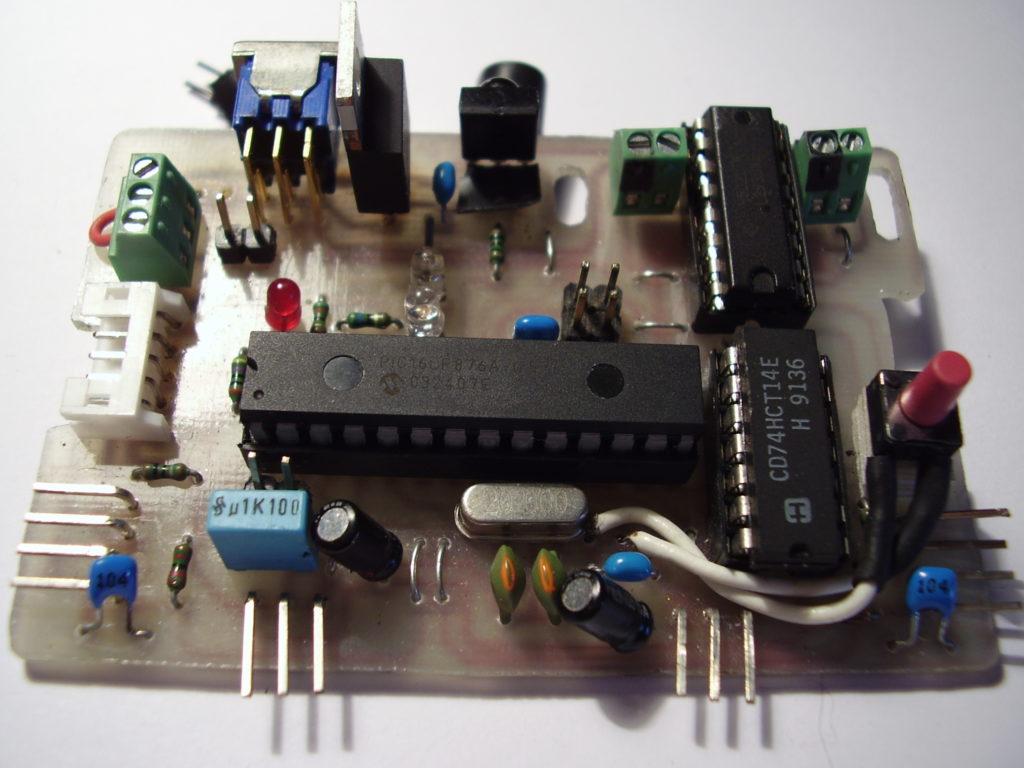
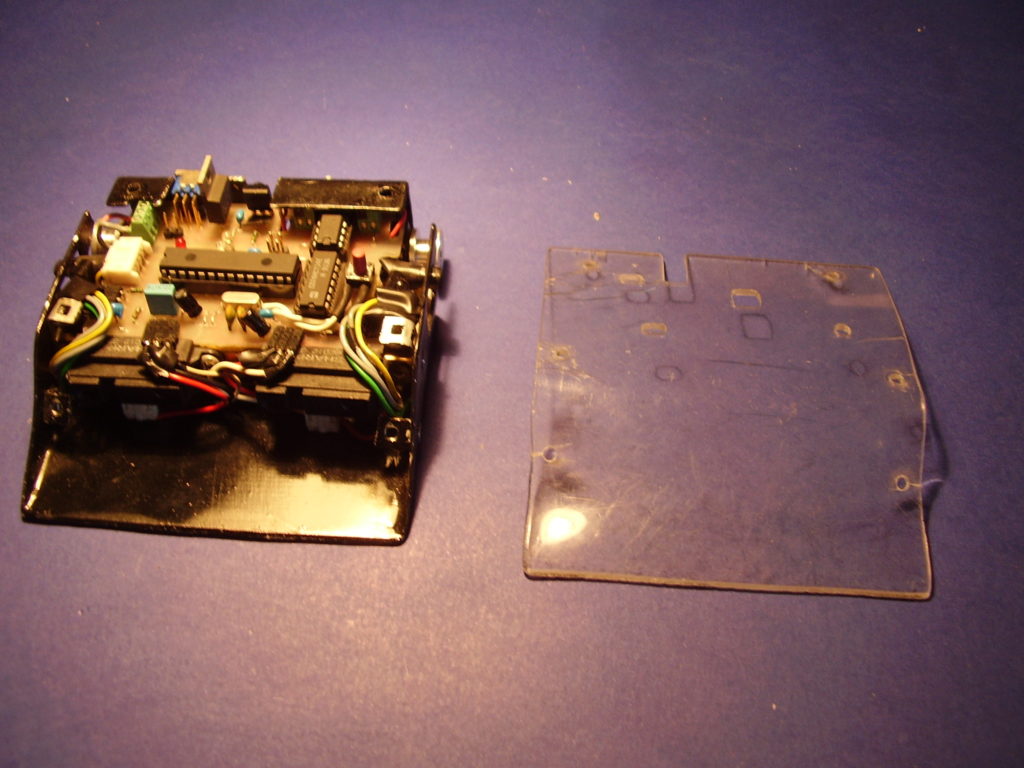
Si sviluppò l’elettronica in due fasi, in una prima istanza pensando di saldare soltanto un sensore infrarosso sulla parte posteriore della scheda, dopo si rese necessario aggiungere un nuovo connettore per aggiungere anche i sensori laterali del robot. Il cervello del robot era costituito da un 16LF876A, la scheda aveva anche un ponte-H costituito dal L293DNE per pilotare in PWM i motori.
Tutta l’elettronica complessivamente era alta soltanto 5mm (escluso il regolatore) e non era dotato di un adattore di tensione per la comunicazione seriale, per riprogrammare il controllore era necessario collegare un RS232 esterno. Si tenne conto anche del consumo della scheda e si mise un LM2940 per far funzionare il regolatore di tensione anche in caso di alimentazioni troppo basse. La batteria da 9V ed 1A al litio era posta nel piccolo incasso che si andava a creare tra i sensori, questa garantiva l’alimentazione a tutti i motori, sensori e l’elettronica del robot in figura.
Era presente un pulsante secondario per poter far cambiare strategia di gara al robot una strategia di attacco ed una strategia di difesa, questa era riconoscibile dal cambiamento di colore dei led del robot blu e rosso. Il robot era dotato complessivamente di 2 GP2D120 per riconoscere l’avversario frontalmente, 3 sensori infrarossi i lati rimanenti, infine di 2 sensori QRB1114 per riconoscere la linea a bordo ring.
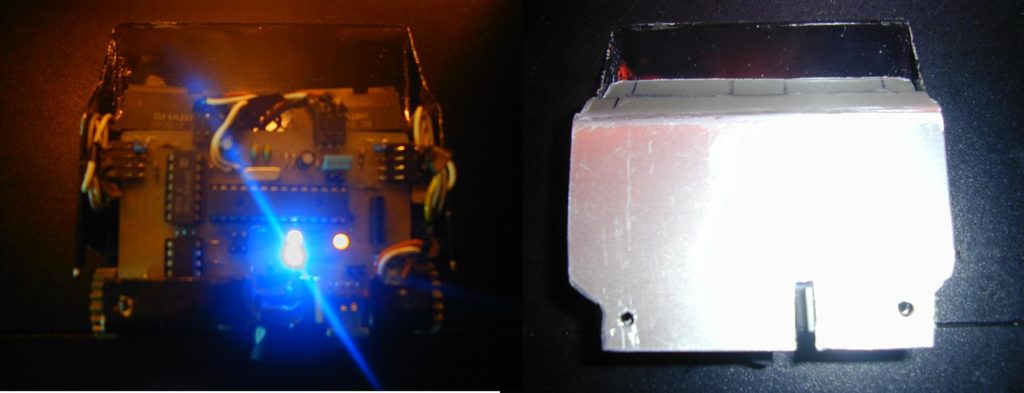

Una volta completata l’elettronica era necessario incassare tutta la struttura del robot costruendo una benna tale per cui potesse effettivamente sollevare l’avversario, si provò prima di tutto costruendola in alluminio (nella figura precedente), ma la struttura e la difficoltà a modellarla dandogli la forma di una benna portarono ad un ridisegno della struttura usando il poliver (nella figura successiva).
La prima versione della benna aveva dei fori per permettere ai sensori frontali del robot di poter vedere con facilità avversari (nella figura precedente), ma presto si scoprì che questo non era necessario e si riprogettò il telaio senza che questi fori fossero presenti, aumentando quindi la superficie liscia del robot e dare la possibilità che le benne dei robot avversari non si incastrassero nei fori (figura successiva).
Il robot da minisumo era oramai ultimato, era necessario però costruire delle gomme per le ruote tali per cui potesse avere una grande aderenza anche quando il robot era spinto da robot più forti di lui. Si iniziò quindi a progettare una ruota, partendo ad un un ingranaggio come cerchio e da una gomma in poliuretano (rosa) partendo come base per gli stampi i tappi delle bottiglie.
Questa soluzione però non poteva durare a lungo, in quanto l’ingranaggio era difficile da serrare con la sufficiente resistenza tale per cui non si sarebbe più potuto muovere, si arrivò quindi a farsi progettare e tornire le ruote, questa volta con dei grani all’interno per poter fissare con maggiore solidità il tutto.

La nuova ruota aveva un incavo per poter permettere alla gomma di poter incastrarsi con maggiore precisione, il robot era oramai ultimato e con tutto l’insieme di aggiornamenti iniziò a superare come numero di vittorie il robot NX-01 diventanto uno dei robot con più vittore sul campo.
L’uso delle due strategie di comportamento influivano particolarmente nel corso della competizione. Riuscire quindi a trovare più rapidamente l’avversario o aspettare il robot ed attaccarlo al suo primo errore, risultarono cruciali per poter vincere le varie partite. L’altezza del robot ed il suo assetto così basso garantirono per molti anni di rimanere un robot difficile da battere.
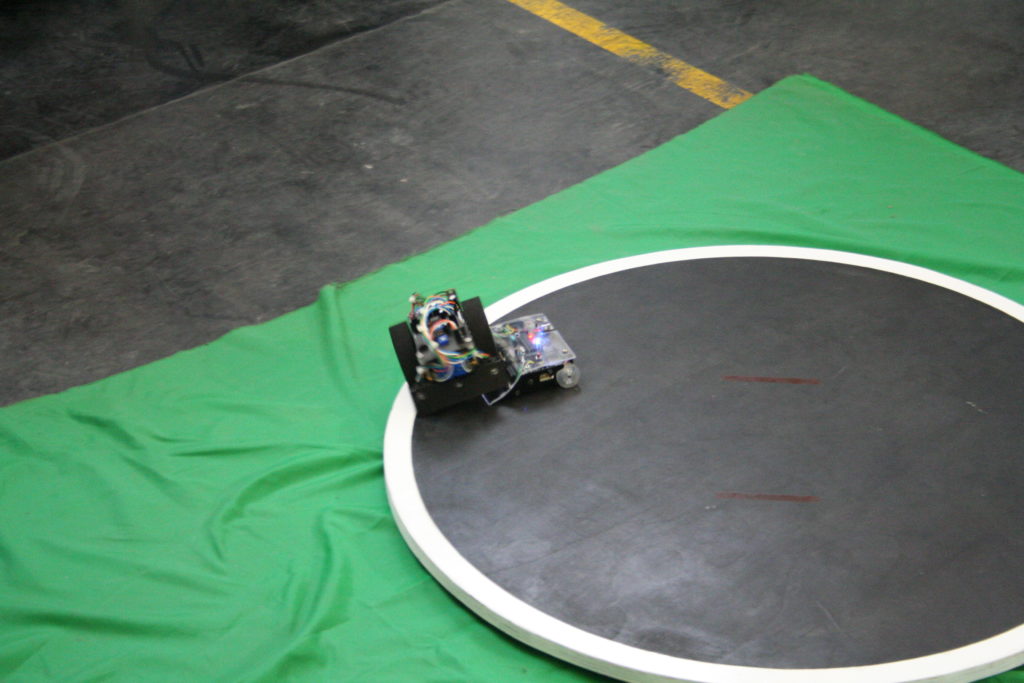

Perfino, certi robot (come Blue Devil) salivano sulla sua benna e si capovolgevano perdendo rapidamente il match. Il robot era grandemente più leggero rispetto alle richieste del regolamento, infatti pesava soltanto 350g, ma riusciva a spostare robot che erano al limite del peso consentito (500g).
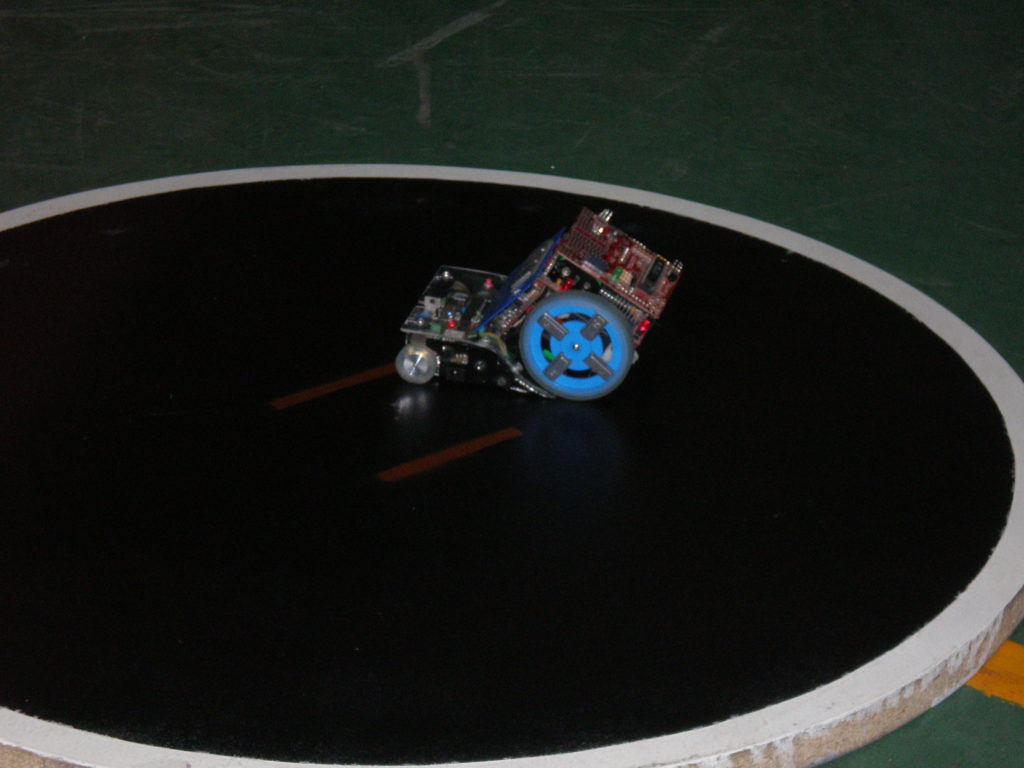
Il robot Dark Blade ha avuto la fortuna di poter gareggiare nella competizione internazionale “Rome Cup 2007” organizzata al campidoglio a Roma e di riuscire a vincere il primo posto.
Il robot Dark Blade alle prese con un avversario, riuscirà il robot a sconfiggerlo? GUARDA IL VIDEO
Premi














