
The Infineon Larix 5 use an open source IMU using standard interfaces/connectors to work with any commercial Engine Speed Control (ESC) and Radio Control (RC). All software is used for academic education in several universities and hosted from MCI Innsbruck.
All code is available also on github.
Concept

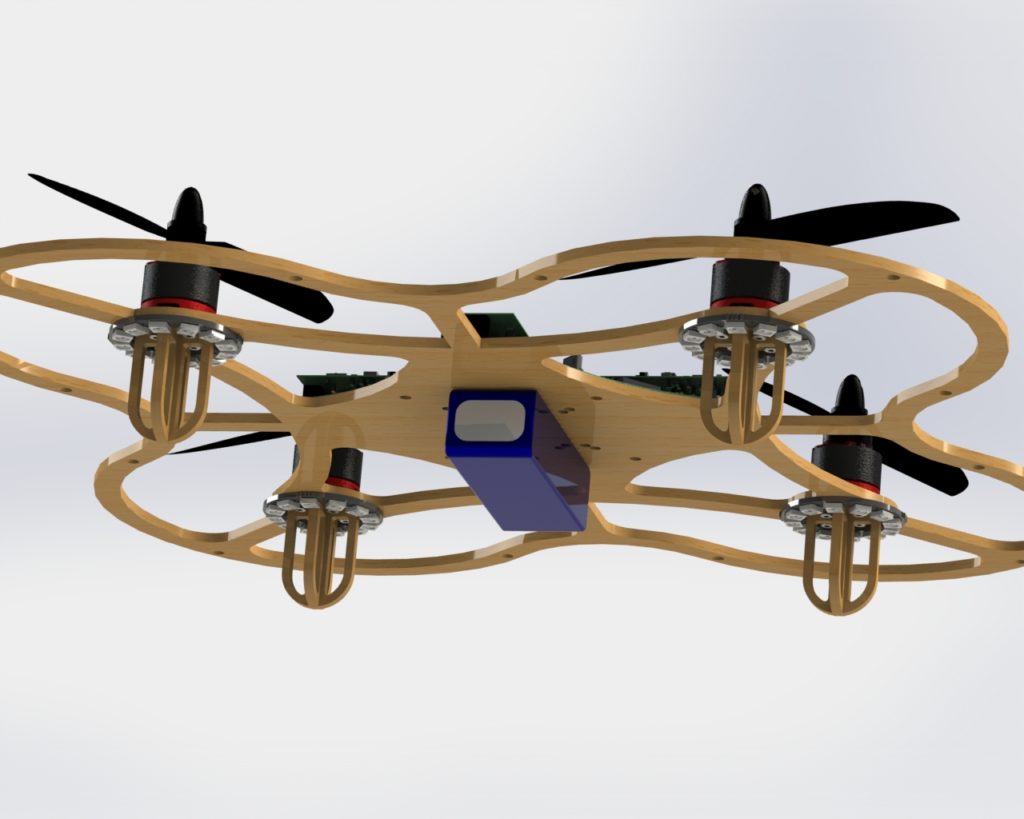

Drone control

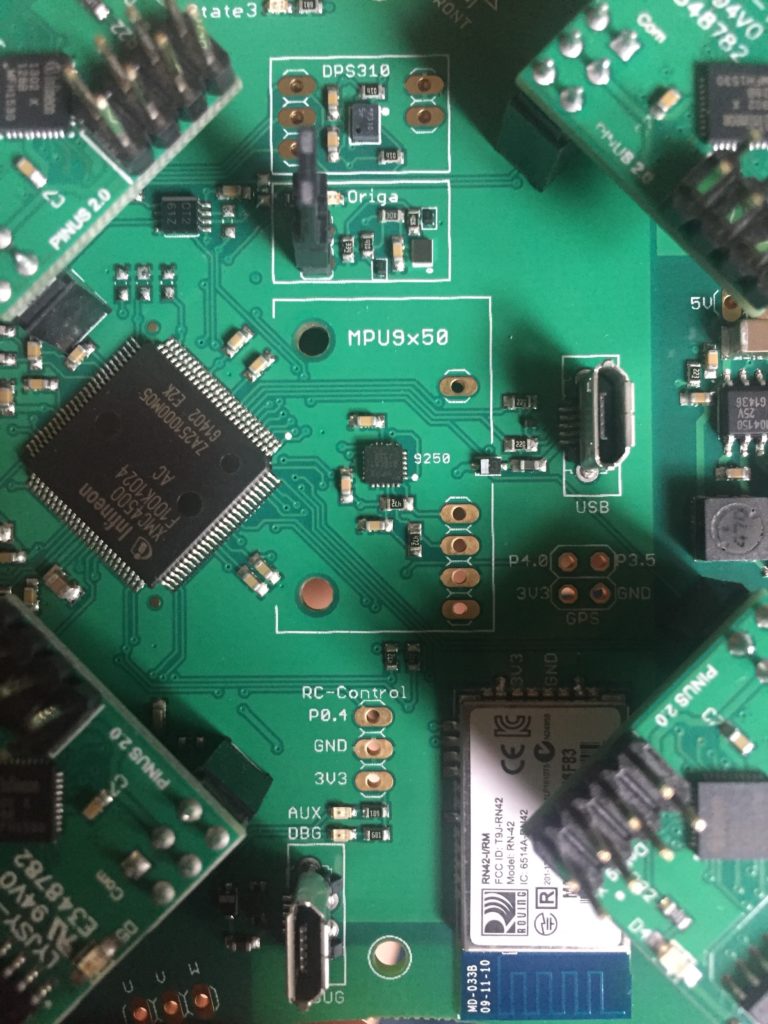

Components



