
Il robot NX-01, (il nome in onore medesima all’astronave della serie Star Trek) nasce come primo robot lottatore per le gare di minisumo, queste gare consistono nell’avere un piccolo robot autonomo capace di riconoscere l’avversario all’interno di un ring e di non cadere da esso.
Il robot partì dal robot Mark III comprato nel 2003 (nella figura seguente) il kit era composto da una logica di controllo costituita dal microcontrollore 16F877A (prodotto dalla microchip) ed era precaricato un bootloader che permetteva di caricare senza bisogno di programmatori ma soltanto di una porta seriale il programma.
Il programma di funzionamento del robot era scritto in PicBasic e garantiva al robot di riconoscere il robot avversario utilizzando i sensori GP2D12 e non cadere dal bordo del campo usando i sensori per il riconoscimento della linea QRB1134.
Durante i primi test, fu chiaro che il telaio costituito dal robot non era capace di garantire di riuscire a sollevare i robot avversari e riuscirli a buttare giù dal ring. Si riconobbero due principali problemi, l’aderenza al suolo delle ruote, il baricentro del robot troppo basso.
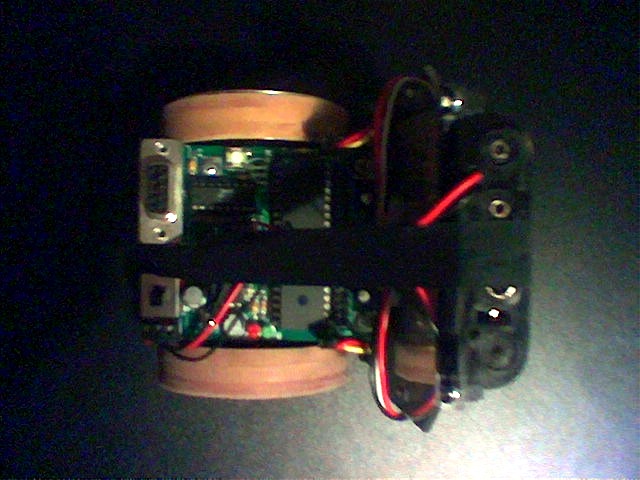

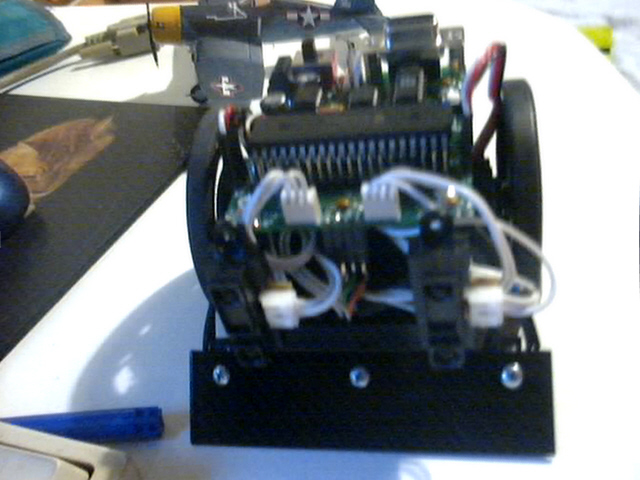
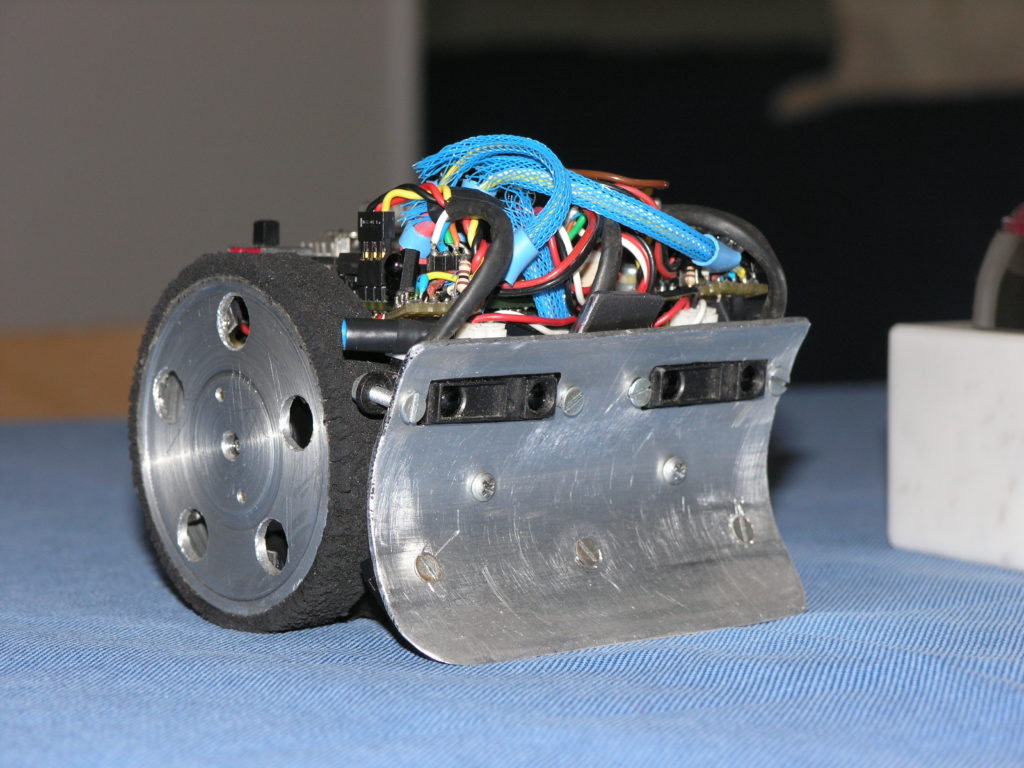
Si iniziò quindi a sostituire le ruote in plastica del robot usando delle ruote tornite in acciaio e con una superficie maggiore di contatto con il suolo (nella figura precedente e successiva), si spostò il baricentro del spostando tutte le batterie del robot frontalmente, in modo tale da evitare far sollevare il robot una volta che la benna avversaria si infilasse sotto quella del robot.
Questa versione ancora non era sufficiente a vincere le competizioni di minisumo, era ancora necessario dover dotare il robot di nuovi dispositivi tali da permettere di poter riconoscere più rapidamente l’avversario e di risolvere il sollevamento del robot in caso che la benna di un minisumo avversario si infilasse sotto quella di NX-01
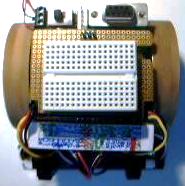
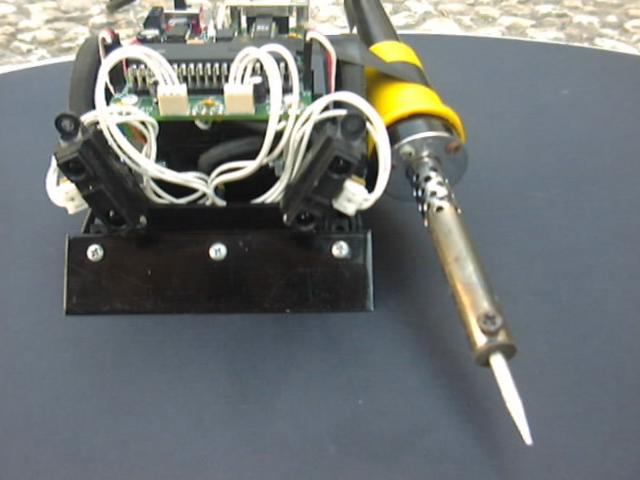
Grazie all’uso della scheda di espansione inventata per il Mark III dotata di breadboard (nell’immagine precedente), si progettarono dei sensori infrarossi per riconoscere robot posti alle spalle del robot e lateralmente.
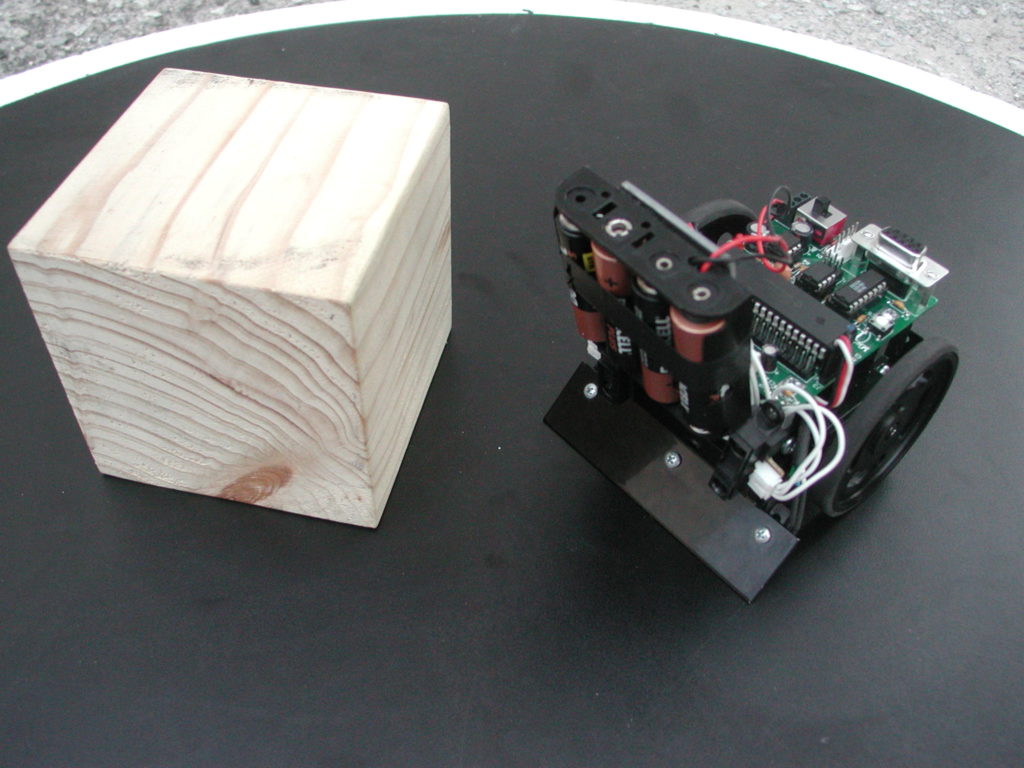
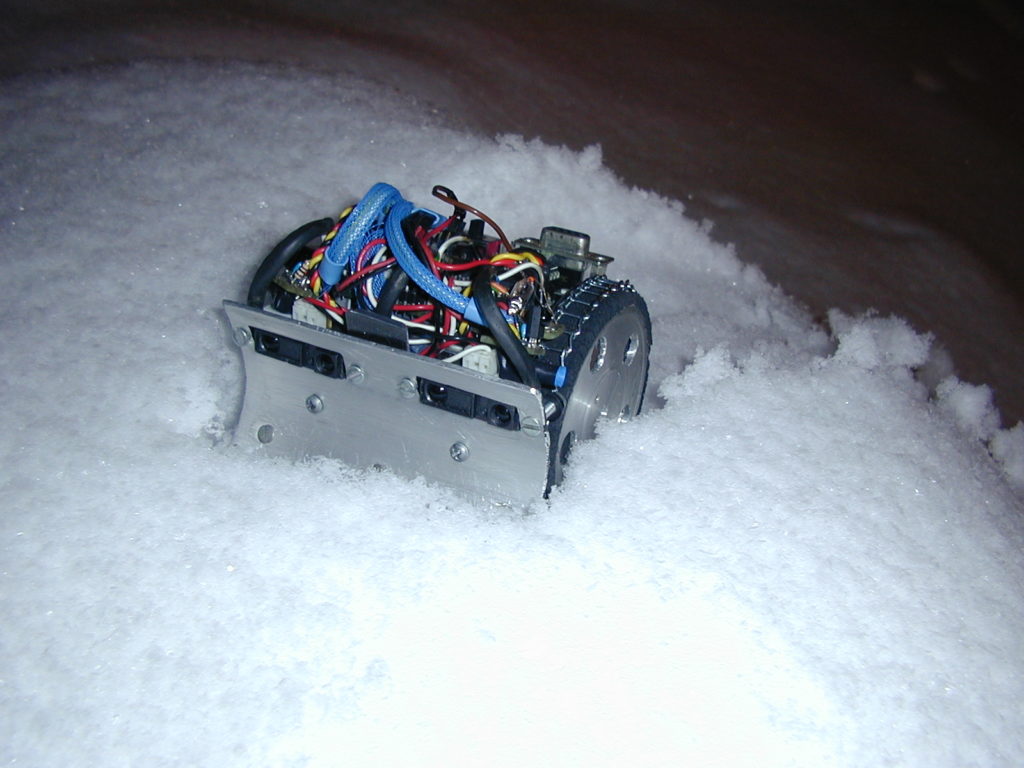
Si arrivò quindi alla versione definitiva del telaio del robot usando al posto della benna standard del telaio una benna che avesse un contato maggiore con il terreno, la nuova forma della benna simile una pala aumentava anche le possibilità di sollevare l’avversario dandogli quindi maggiori possibilità di vincere il match. Il peso del robot però divenne maggiore del limite richiesto per la categoria (maggiore di 500g) e divenne necessario alleggerire il robot. Si iniziò quindi bucando le ruote in acciaio del robot e sostituendo le batterie standard del robot (Normali stilo AA) con batterie al litio ben più performanti e capaci di erogare molta più corrente.

Dopo tutte queste modifiche il robot iniziò a vincere le sue prime gare (oramai era passato già più di un anno rispetto alla sua prima versione), ma per un po’ di anni a venire le performance del robot gli hanno garantito molti premi.
L’ultima modifica del robot fu sulle gomme, in quanto quelle in spugna non riuscivano a dare il sufficiente aderenza al suolo. Le gomme realizzate “ad-hoc” e con uno spessore di 5mm hanno garantito al robot più e più gare vinte.
Line follower
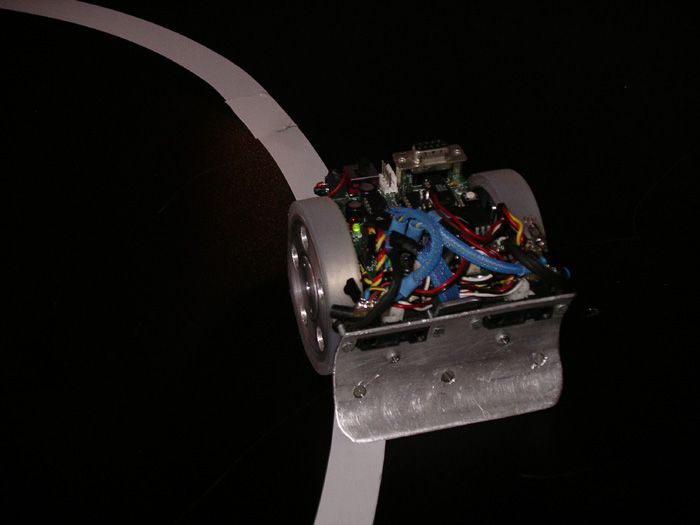
Il robot era dotato anche di un codice che permetteva al robot grazie ai suoi 3 sensori di linea di poter inseguire una linea, questa peculiarità assicurava di poter competere nelle gare di “Line Follower”.
Video
Il robot NX-01 in gara a Pisa, ecco le prestazioni del robot in gara del piccolo robot
Altre foto
Premi




