
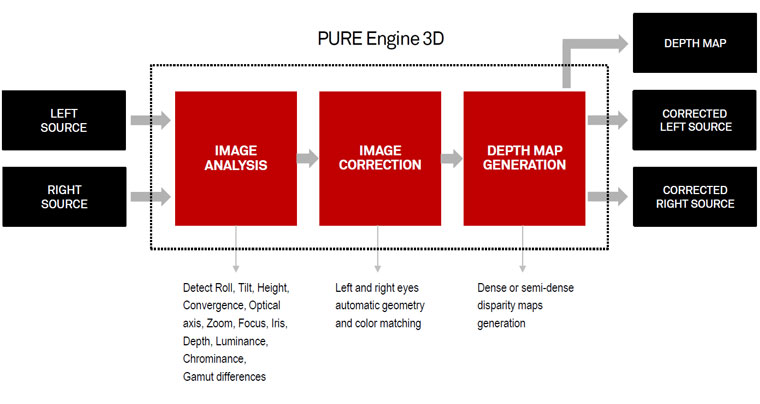
The ZED Stereo Camera made from stereolabs is a lightweight depth sensor based on passive stereovision.
The technology of the ZED stereocamera is an integrate controller to generate from the two cameras the disparity map and all camera correction source after camera calibration.
This sensor have a particular feature optimal for robotics application:
- Outputs a high resolution video on USB 3.0 with synchronized video streams
- Max video mode with 2.2k at 15k frames per second, output 4416x1242 px
- Depth range: 1.5 - 20m
- Camera baseline: 120mm
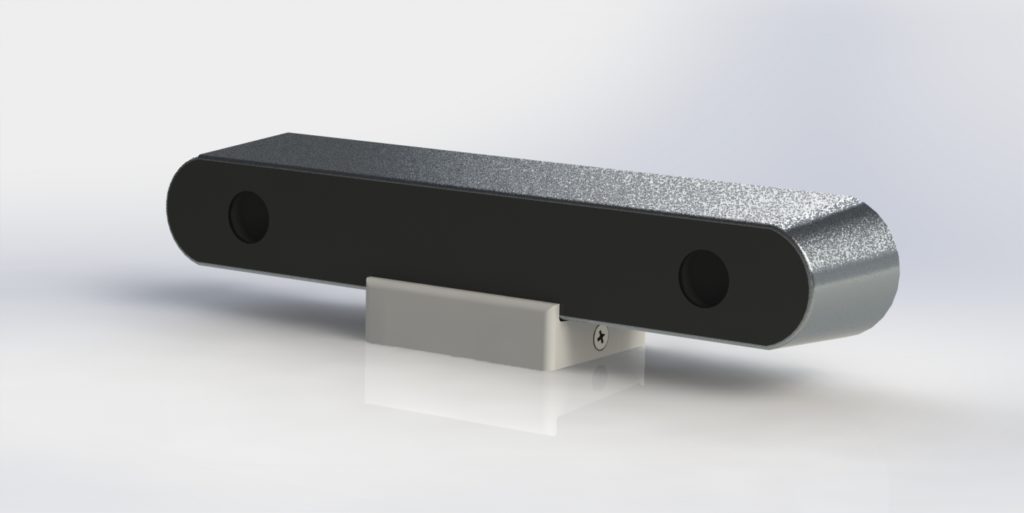
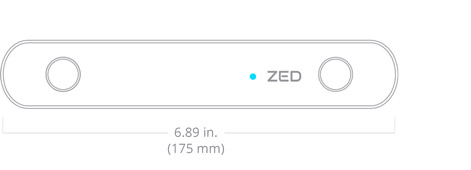
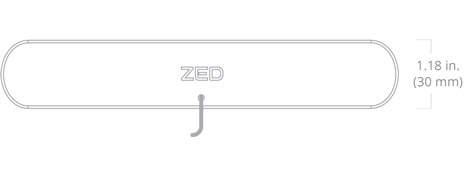
- Dimension: 175 x 30 x 33 mm
- Weight: 159 g
When you buy a ZED in the box you have the sensor, a usb pen drive with all driver, a documentation and a mini stand tripod.
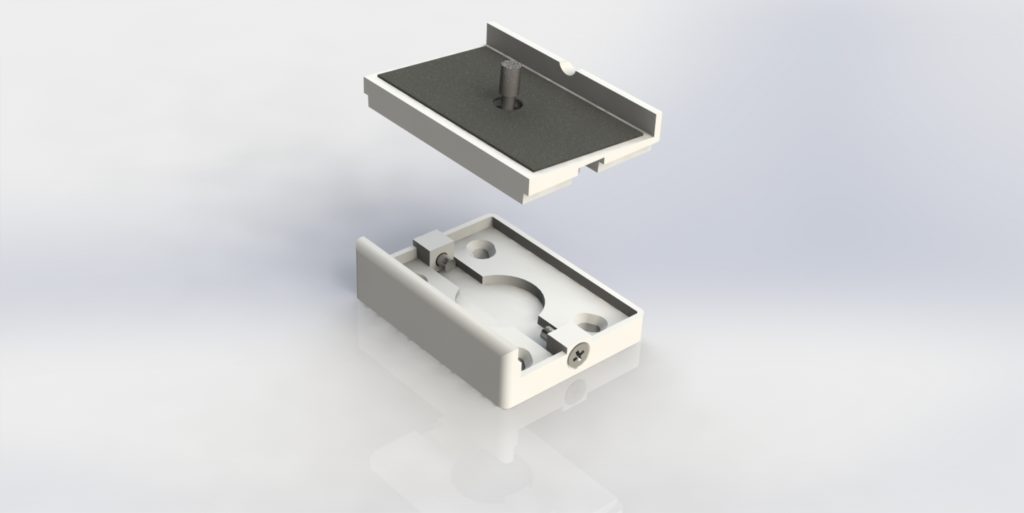
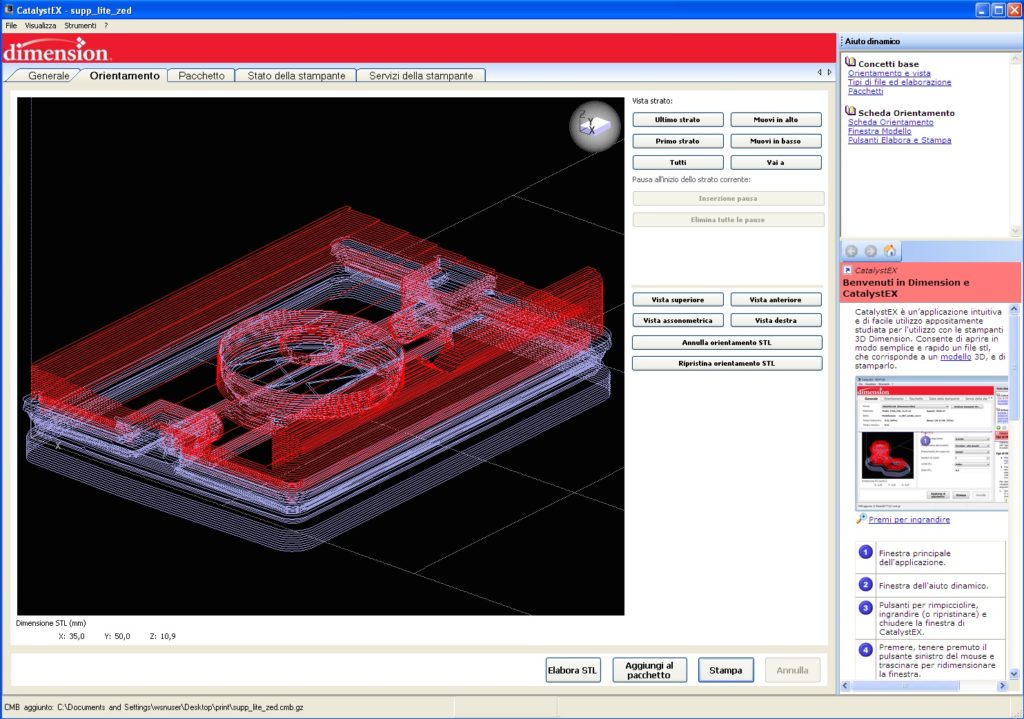
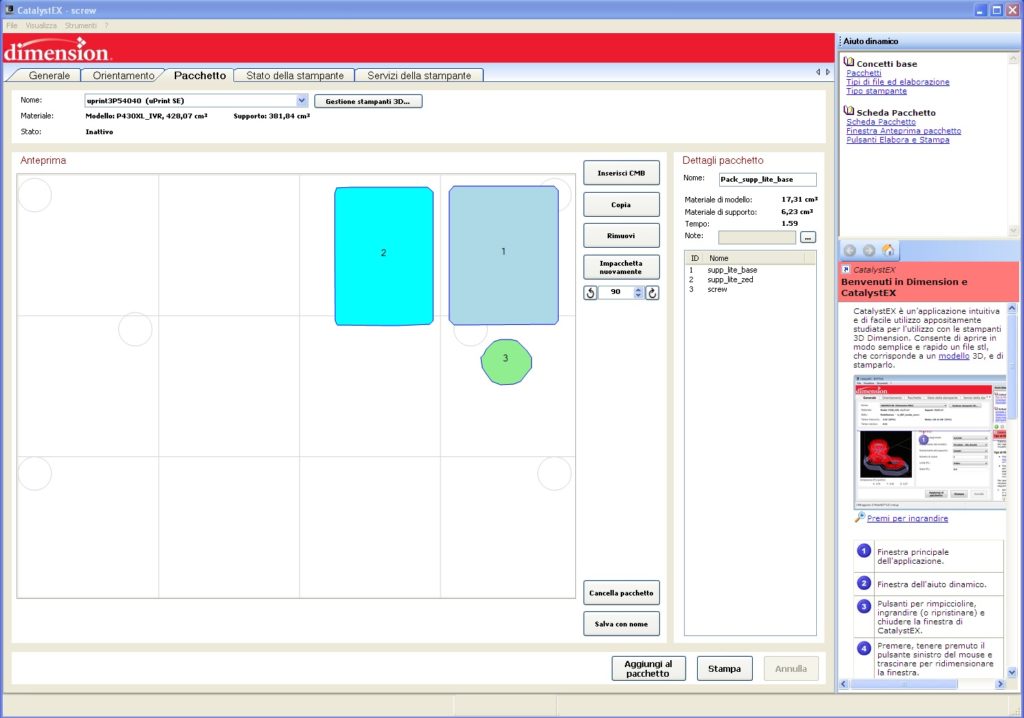
This tripod isn’t useful when you use for robotics application and you want fix strongly in your chassis. To solve this problem I’ve build a new stand to align the sensor with plane, because this camera have a format of 3,8° from rear side to camera side.
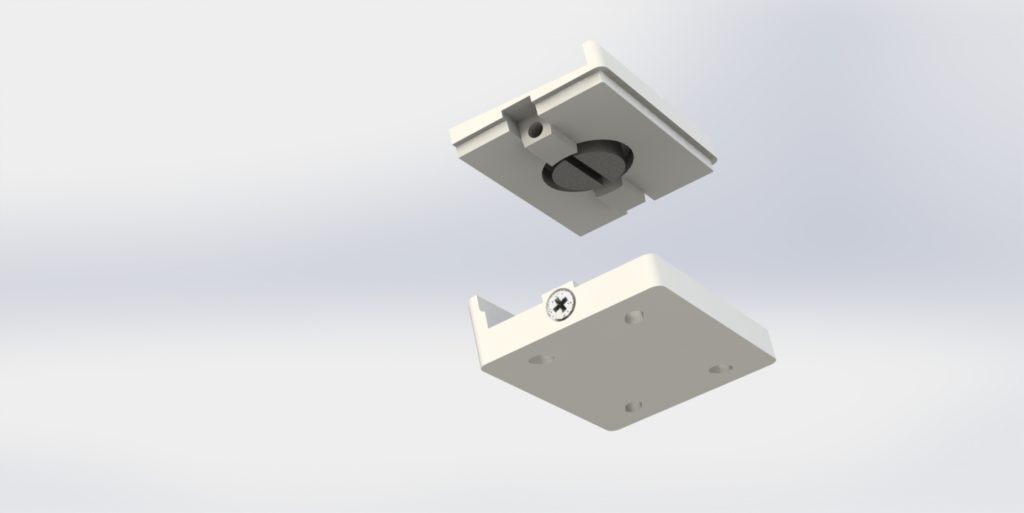
The ZED stand have maximum size of 35 x 50 x 14 mm. It’s divided in two parts. The first one is to screw the stan to the chassis, the second one to connect with a photographic screw to zed camera.
All information about weight are collected in the following list:
- Upper 8 gram
- Lower 9 gram
- Total with all screws 24 gram
- With ZED sensor assembled 183 gram
In the following gallery, the all step to print this stand and a test




This Stand is available on grabcad, you can find a 3D model and a technical drawings with all detailed information about this ZED stand. You can buy a photographic screw from amazon

