
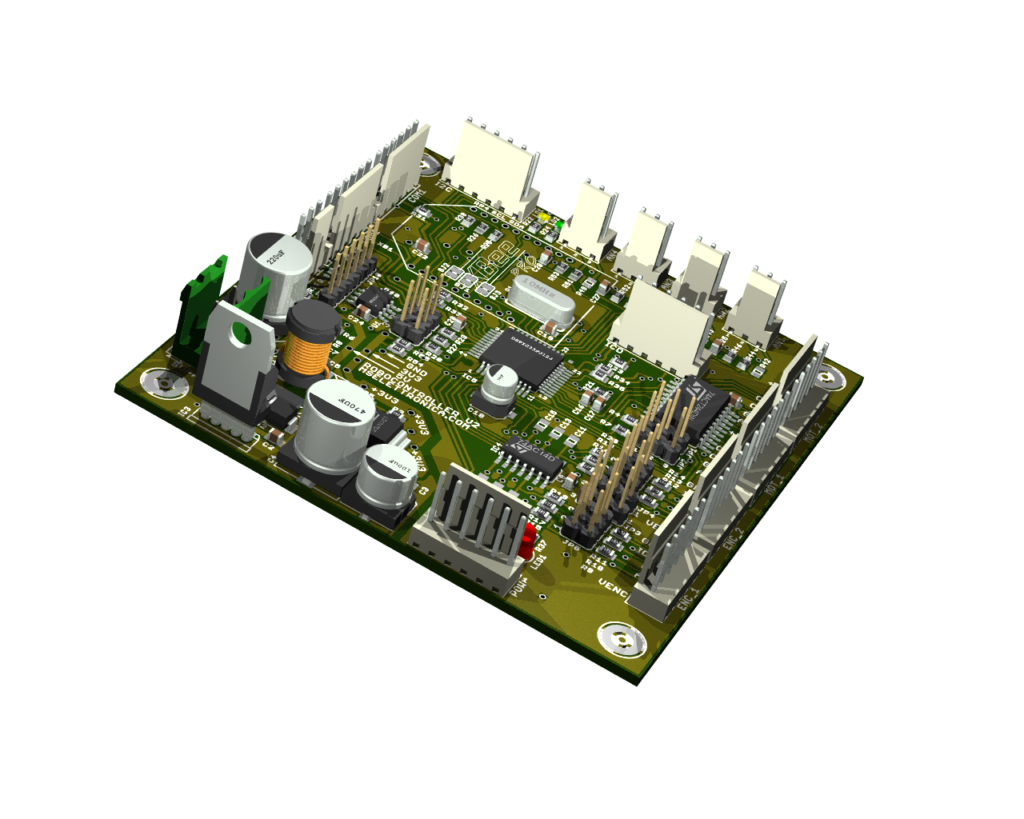
t’s a little powerful motor control board in 4x4cm and is open source and open hardware project is fully available on github. With this board you can control two DC brushed motors with different control law, position control, velocity control and torque control. The board works better with ROS.
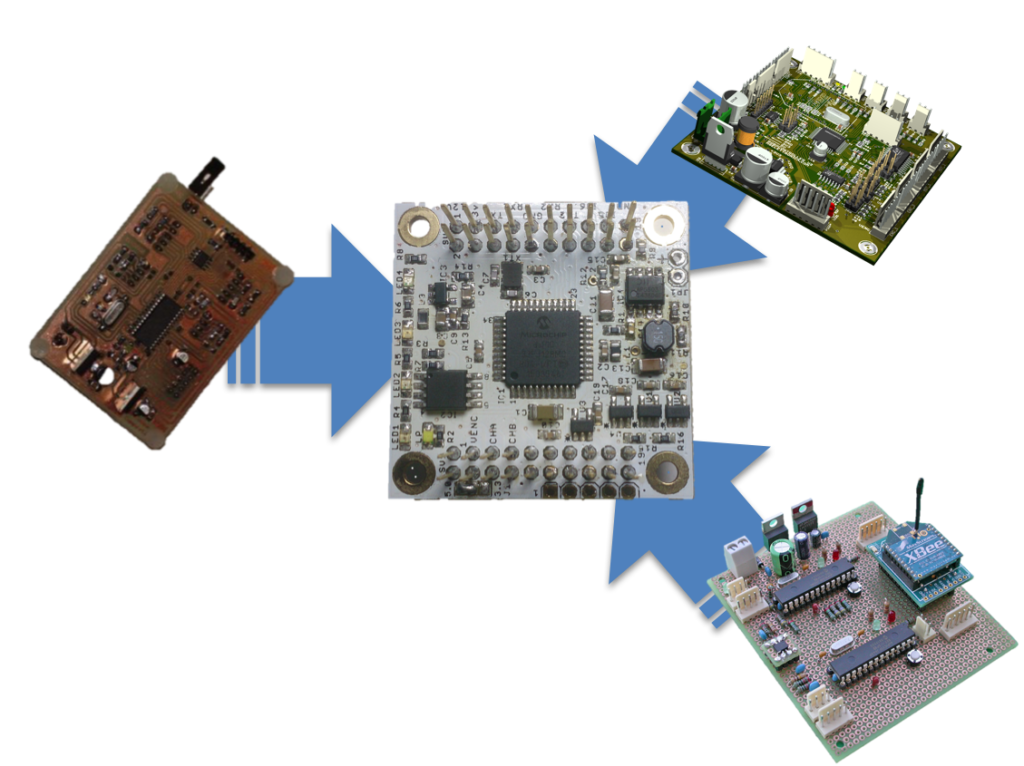
unav is a fusion from three different project. This project started during the autumn on 2014, and now more robot use this board.
Robocontroller
A commercial product designed by Mauro Soligo. This board had a dspic33 and different connectors to connect motors, h-bridges and other
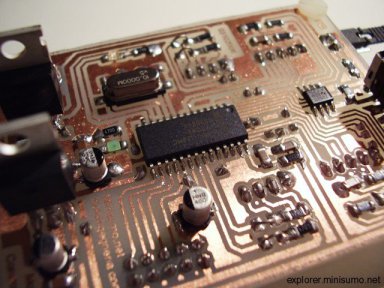
Motion control
This is my board and was designed in 2008, a dsPIC33 Microchip controller and was a part of project during my bachelor degree.
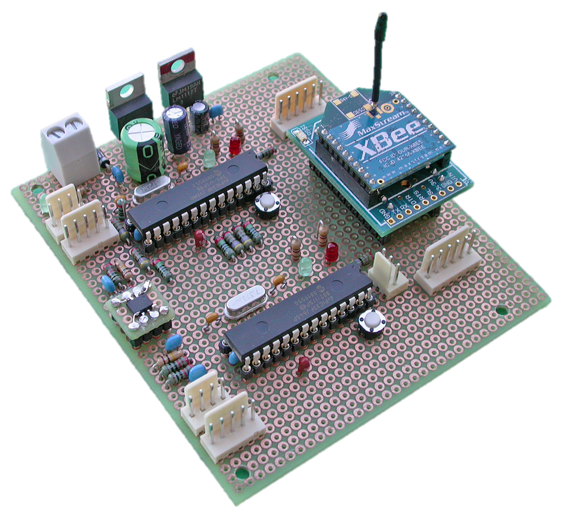
dsNav33
developed by Guido Ottaviani, this board was designed before with three dsPIC30 and in the last release with one dsPIC33.
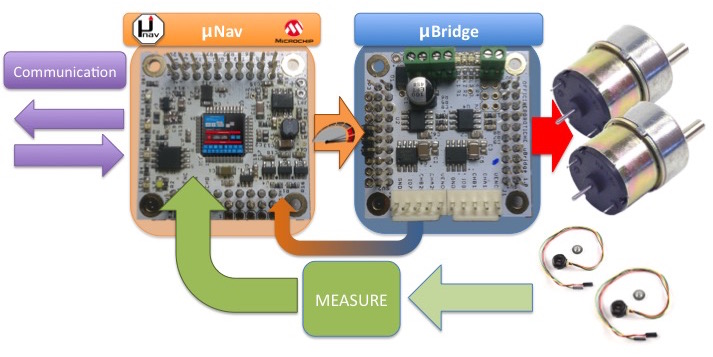
How it’s works
inside the unav beats an “home made” kernel that control all peripherals and with these can control two DC brushed motors. All code as written in MPLABX.
or_bus_c.X
With this library the unav can communicate with a PC or another board with same protocol. In OR_BUS are collected all type of messages can send or receive.
or_kernel_c.X
The heartbeats of the unav is written inside in this library. In this library are collected the system and task manager, the controller for the I2C, gpio, etc etc
or_common_c.X
In this library are written the driver for eeprom, lcd, and other general math function.