Choosing a ROS-enabled Embedded Board
Hello ROS Developers. This is the Morning Sessions of ROSDevDay.
- 10:22 Hands-on with Ignition and ROS2 (By Louise Poubel, Ignition Technical Lead at Open Robotics)
- 1:09:44 Working with Mobile Manipulators (By Alejandro Arnal Espinola, Software developer at Robotnik Automation SLL)
- 2:09:48 Creating Robot Statistics Easily (By Victor Lopez Boy, Software Engineer at Pal Robotics)
- 3:26:04 ROS2 Planning System for Developing Intelligent Robotic Behaviors (Francisco Martín, Lecturer & Researcher on Robotics at Universidad Rey Juan * Carlos)
-
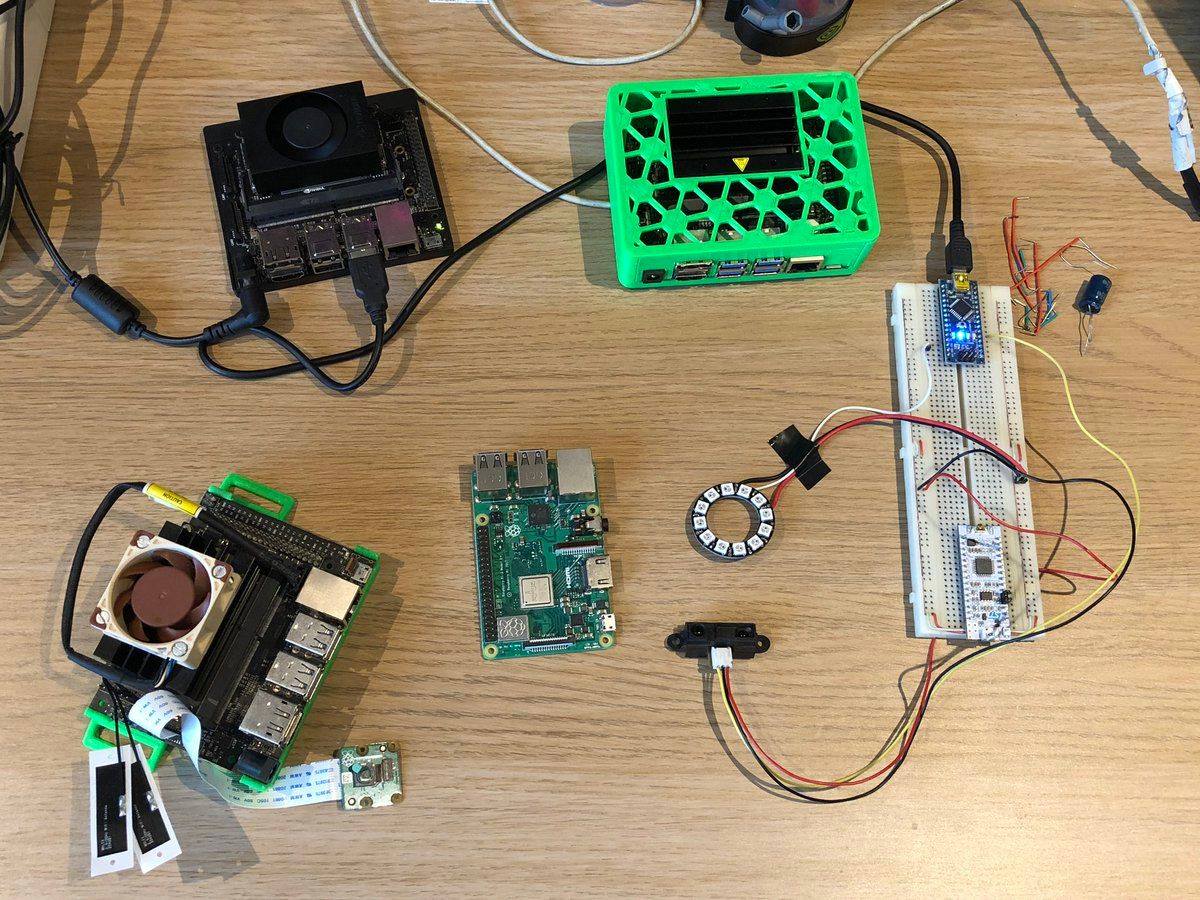
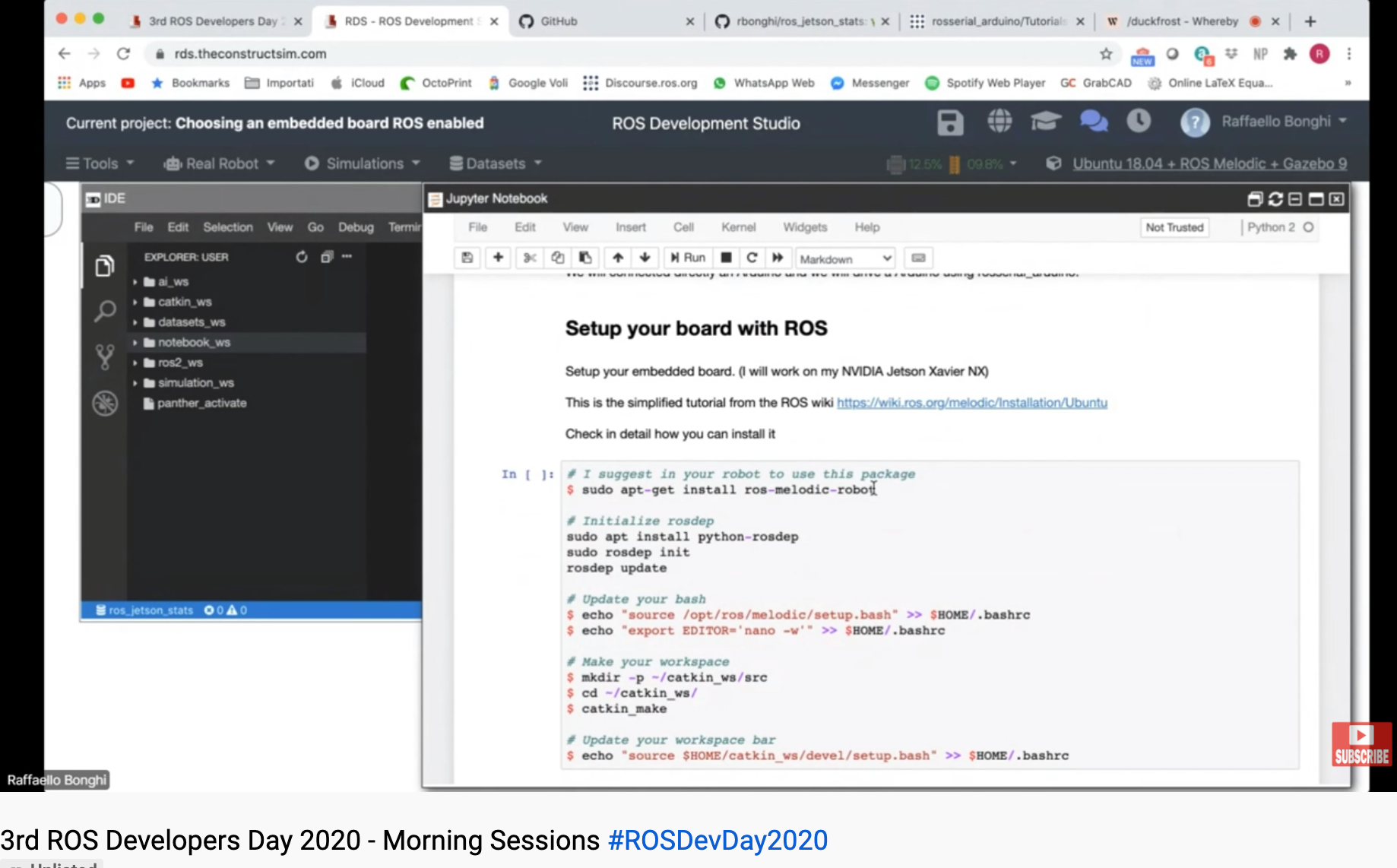
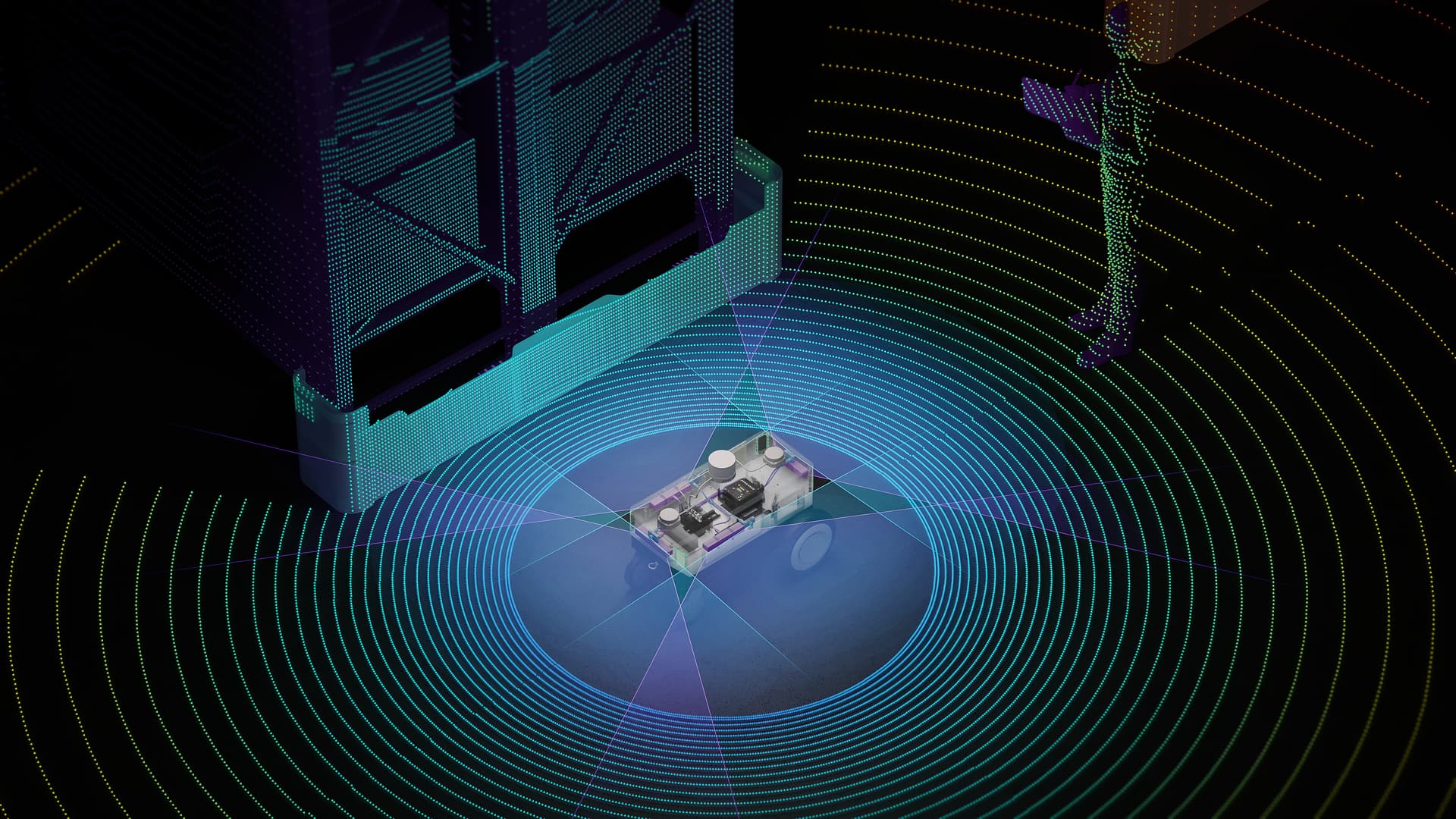
4:29:44 Choosing a ROS-enabled Embedded Board (By Raffaello Bonghi, Robotics, computer vision scientist Father of Panther) - 5:30:58 Server-Client Discovery: an alternative node discovery mechanism for ROS 2 (By Eduardo Ponz Segrelles, Software Engineer at eProsima)